概要
3次元メディア社の製品を活用し、4台のカメラにより点群計測と輪郭マッチングを行い、3次元CADデータと照合して、ワークをピッキングをするシステムです。設定が簡単で、採用実績の豊富なため、安定性、信頼性の高い3次元ピッキングシステムを構築できます。
特徴
困難なバラ積み製品を確実にピッキング
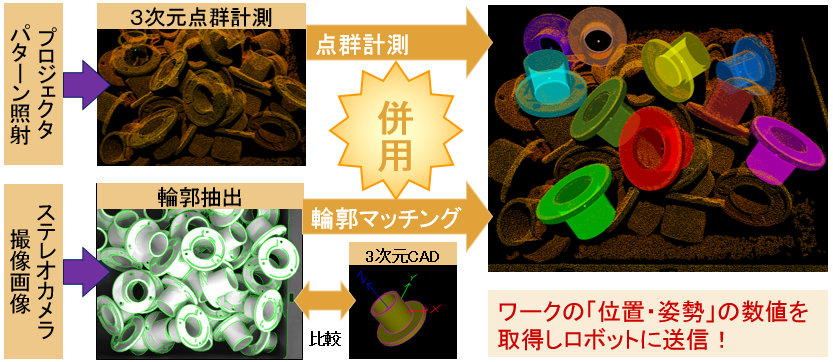
点群計測と、輪郭マッチングがX,Y,Z方向を正確に位置計測します。
プロジェクタのパターン照射を4台のカメラにより点群計測を行います。これにより得られた正確な距離・輪郭情報を3DCADデータと照合します。従来カメラ2台のステレオ方式やカメラ1台+プロジェクタのピッキングシステムと比較し、死角が少ないため検出安定度が飛躍的に向上しています。これにより従来3Dピッキングがうまく行かないとされる、光沢湾曲ワークや黒色ワークでも安定した検出が可能です。
設定が簡単ですぐに運用可能
複雑なパラメーター設定が不要です。
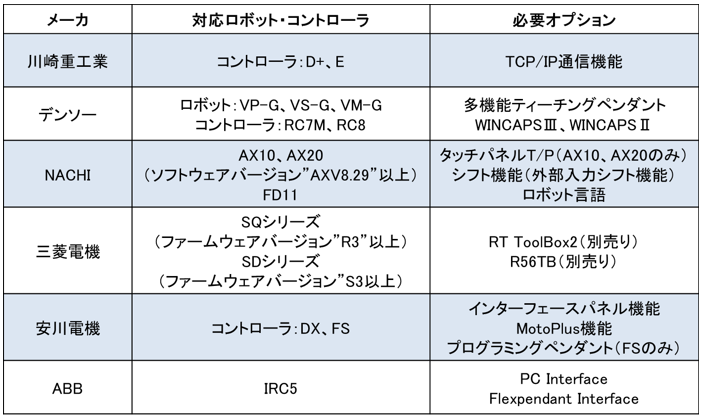
大手ロボットメーカーとのアライアンスにより、各社呂のbotのコントローラ画面に対応した専用の設定画面を用意しております。これによりティーチング時間を短縮できるため、設備の立ち上げ全体の時間も短縮が可能です。
採用実績が豊富
数ミリ~数メートルまで多彩なワークのバラ積み用途でご採用いただいております。
自動車関連プレス部品や鍛造部品など人では大きさや重さなどの問題で長時間持ち運びができないものや、鋳造品などの表面状態が不安定な金属ワーク、複雑な形状で小さな樹脂成形品など、今まで検出が困難とされていたワークを安定してピッキングすることができます。導入実績が豊富にありますので、健闘から導入までお客様のワークに合わせて適切なご提案をさせていただきます。

効果
省人化によるオペレーターの負担軽減
人手で行っていたピッキング業務をシステムで代替することで、オペレータの作業負担や習得負担を軽減できます。
多品種対応によるレイアウトの簡略化
多品種の製品を一つのラインで対応できるため、生産ラインのライアウトを簡略化、スペースの有効活用が可能です。
段取替えの簡略化によるリードタイム改善
多品種対応により段取替えの回数が削減できるため、設備の稼働率を高め、スループット・リードタイムを改善できます。
事例
自動車関連メーカーをはじめ、様々な業種のお客様に導入いただいております。
-
- 3次元ロボットピッキングシステムによる自動車CVT部品ピッキング事例
自動車のCVT部品(鍛造製品)を加工工程に搬送している事例です。
続きを読む>>
-
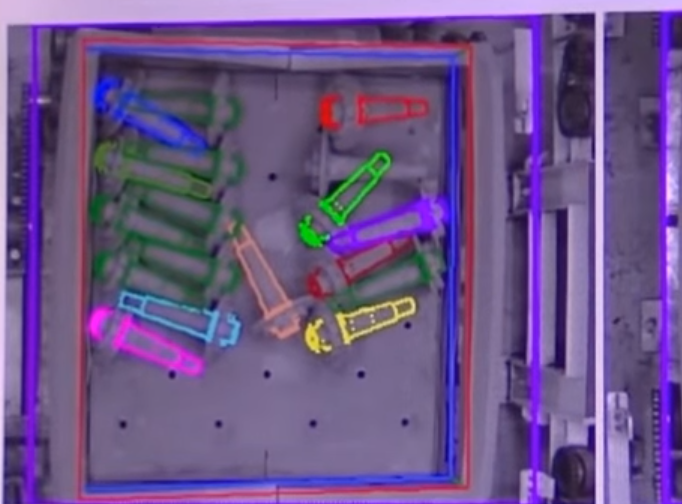
- 3次元ロボットピッキングシステムによる板金部品ピッキング事例
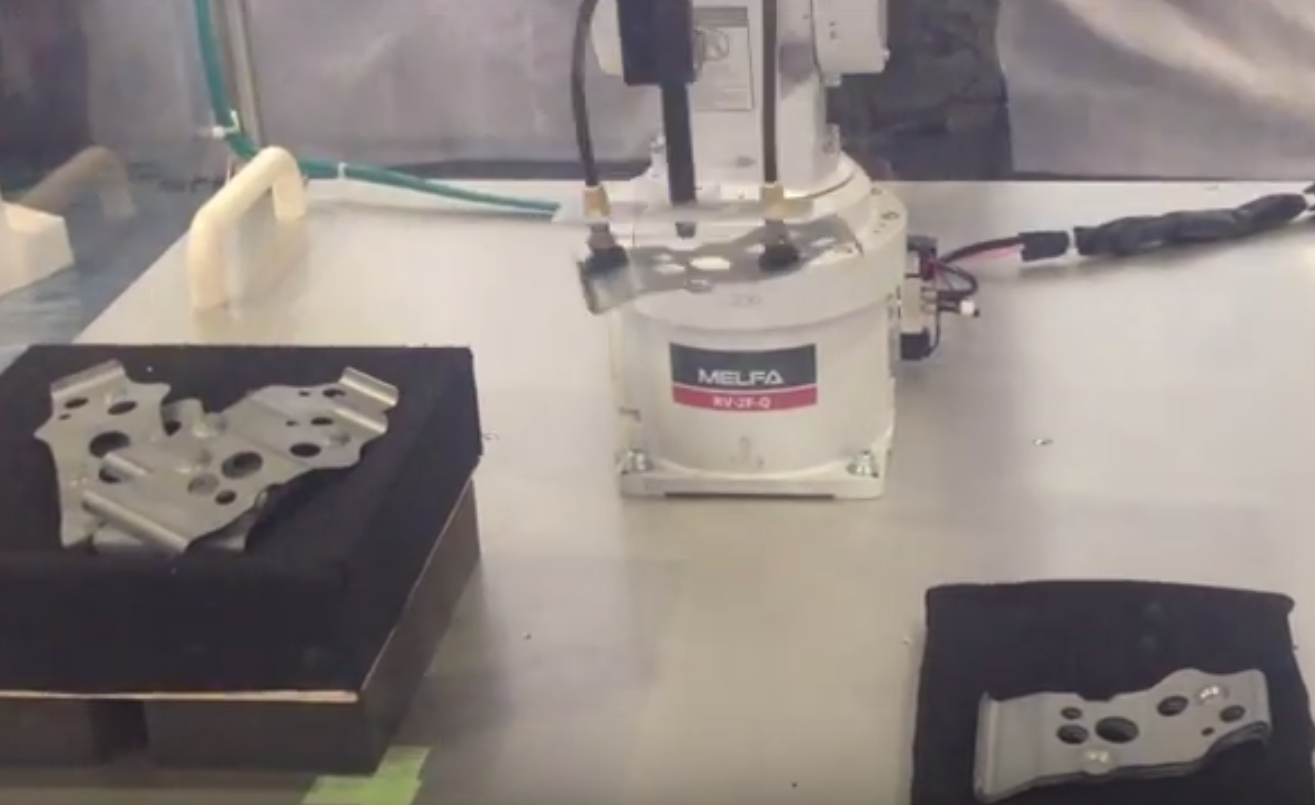
3次元ロボットピッキングシステムによる板金部品のピッキング事例動画です。
続きを読む>>
-
- 3次元ロボットピッキングシステムによるロボット大賞デモ動画

3次元ロボットピッキングシステムによりロボット大賞をとったデモ機の動画です。
続きを読む>>
-
- 3次元ロボットピッキングによるボルトピッキング事例

3次元ロボットピッキングによりボルトをピッキングしている動画です。
続きを読む>>
導入手順
- 要件定義
- 設計
- 設定
- 対象ワークの3次元認識評価、検証
- カメラの設置条件、レンズ設定等の光学設計を実施
認識安定化のための照明・外乱光対策の検討 - 要求仕様に適したパラメータの設定