概要
自動車のCVT部品(鍛造製品)を加工工程に搬送している事例です。
参考動画
課題
重量のある鍛造品の搬送はオペレータに負荷が高く、かつ、搬送中の衝撃等による打痕が発生し、産廃品が発生する課題がありました。解決策
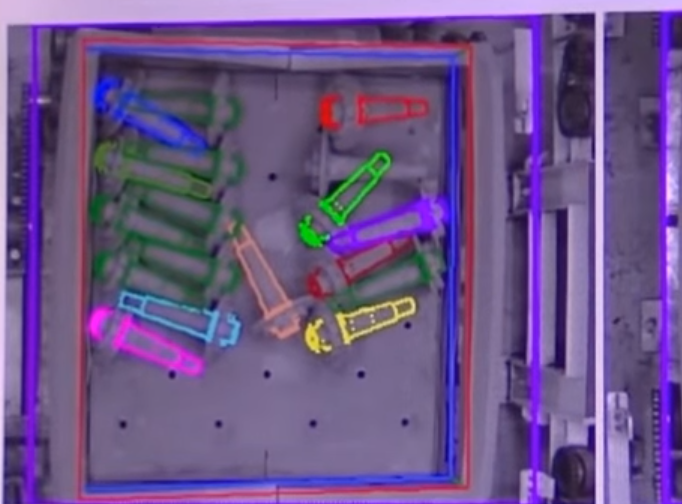
鍛造されたワークをロボットビジョンで3次元認識し、ロボットで取り出して、研磨工程に搬送する工程にしました。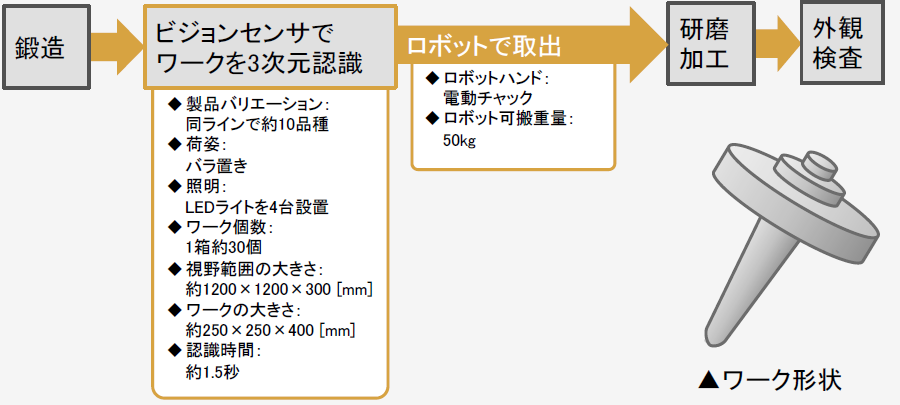
効果
省人化ともにオペレータの負荷軽減に貢献し、生産リードタイムの低減になりました。 また、打痕発生率の低下により産業廃棄物の削減にも寄与しました。利用製品
